


FEATURES

FEATURE 01
INSPECTION CAMERA0.5mm crack detectionA wide variety of cameras can be mounted as a payload. High-resolution cameras allows to detect up to 0.5mm degradation . (Example: SONY α7R4 70mm lens, shot from 5m distance)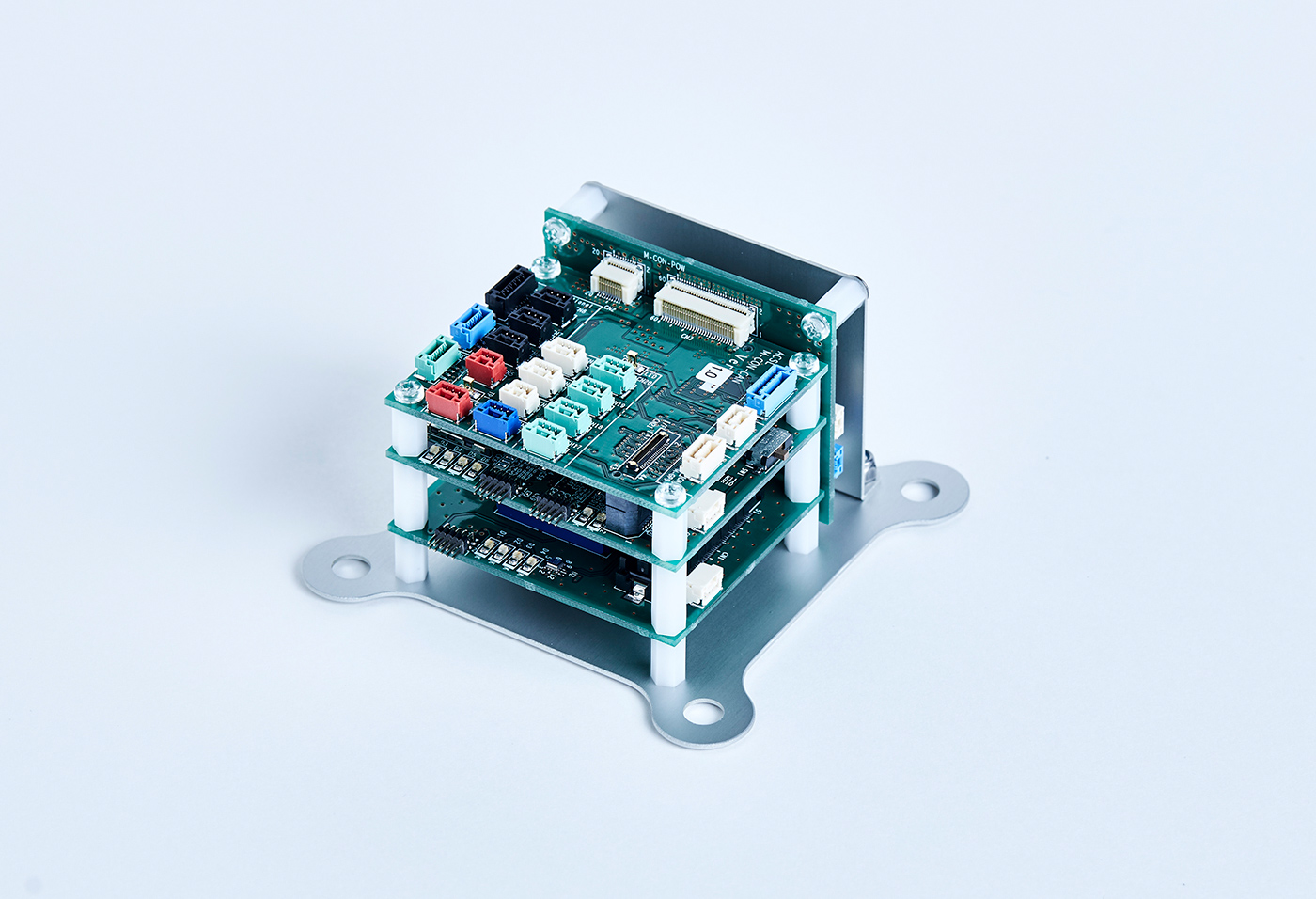
FEATURE 02
FLIGHT CONTROLLERACSL's proprietary control algorithmFlight controller is a critical component of the drone. ACSL has developed own flight controller based on proprietary advanced control algorithms.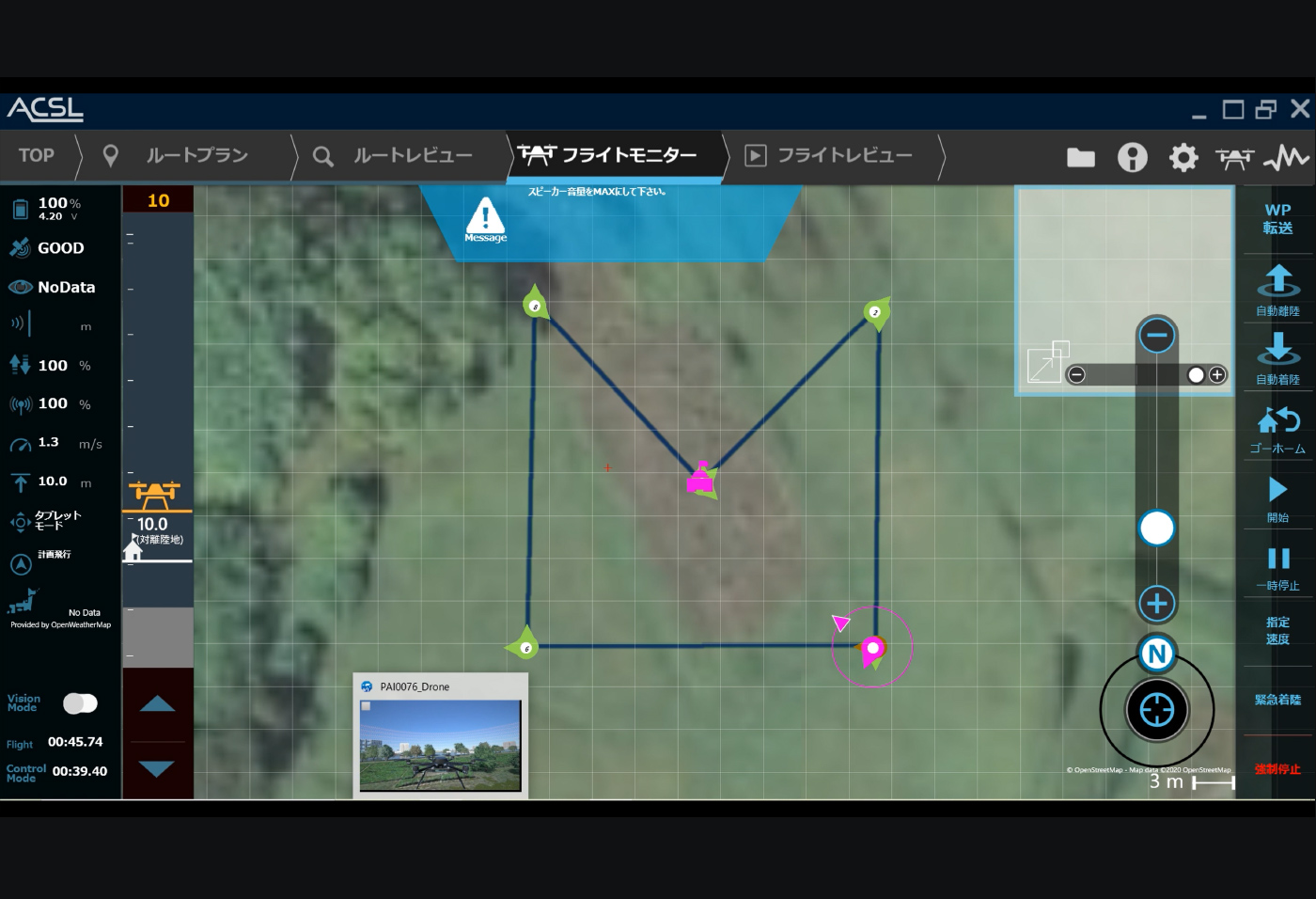
FEATURE 03
PF-STATIONFully remote control in autonomous flightFor safety drone operation, the control information integrated into one. Various drone telemetry information is monitored in real-time and managed. Check the battery level, data communication status, current position and flight route, etc. at a glance, and the system gives warning if abnormal situation happens.-
FEATURE 01
INSPECTION CAMERA0.5mm crack detectionA wide variety of cameras can be mounted as a payload. High-resolution cameras allows to detect up to 0.5mm degradation . (Example: SONY α7R4 70mm lens, shot from 5m distance) -
FEATURE 02
FLIGHT CONTROLLERACSL's proprietary control algorithmFlight controller is a critical component of the drone. ACSL has developed own flight controller based on proprietary advanced control algorithms. -
FEATURE 03
PF-STATIONFully remote control in autonomous flightFor safety drone operation, the control information integrated into one. Various drone telemetry information is monitored in real-time and managed. Check the battery level, data communication status, current position and flight route, etc. at a glance, and the system gives warning if abnormal situation happens. -
FEATURE 01
INSPECTION CAMERA0.5mm crack detectionA wide variety of cameras can be mounted as a payload. High-resolution cameras allows to detect up to 0.5mm degradation . (Example: SONY α7R4 70mm lens, shot from 5m distance) -
FEATURE 02
FLIGHT CONTROLLERACSL's proprietary control algorithmFlight controller is a critical component of the drone. ACSL has developed own flight controller based on proprietary advanced control algorithms. -
FEATURE 03
PF-STATIONFully remote control in autonomous flightFor safety drone operation, the control information integrated into one. Various drone telemetry information is monitored in real-time and managed. Check the battery level, data communication status, current position and flight route, etc. at a glance, and the system gives warning if abnormal situation happens.

SCENE 01

SCENE 02

SCENE 03
The product specifications may change without prior notice.
The product specifications may change
without prior notice.
-
CASE 01
Nishimatsu Construction, Auto-crack detection for concrete floorAutomating concrete floor crack detection using dronesNishimatsu Construction and ACSL developed a system to automatically detect cracks in concrete floors. This system consists of autonomous drone that operate in indoor environment, and concrete crack detection algorithm. Compared to conventional method, it is expected to improve the quality of crack detection, and to reduce the cost for conducting the inspection.
-
CASE 02
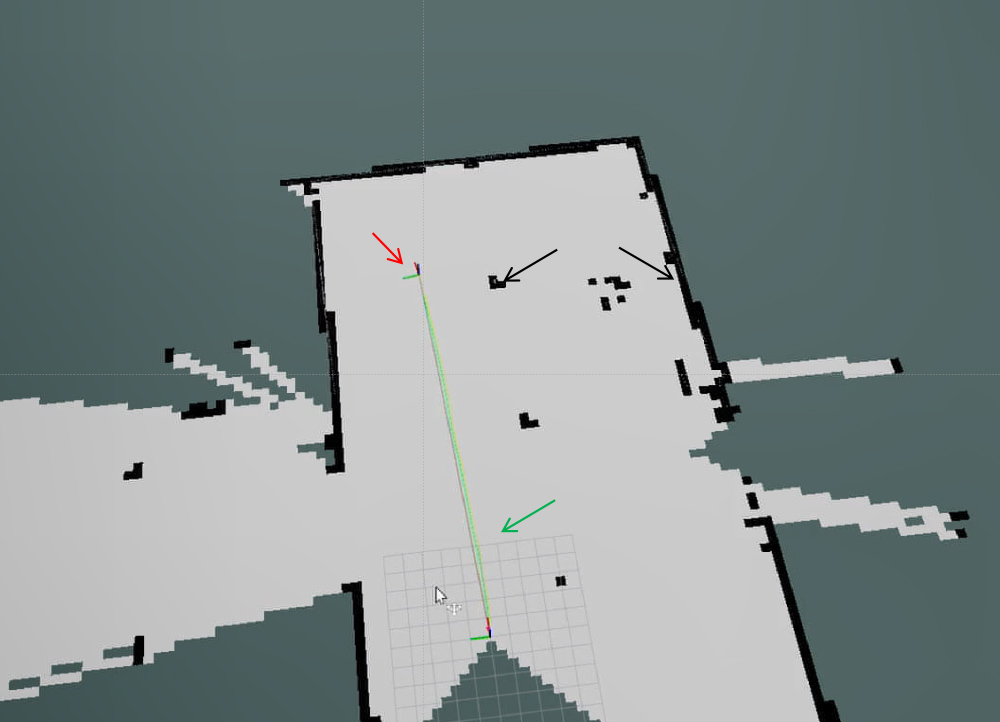
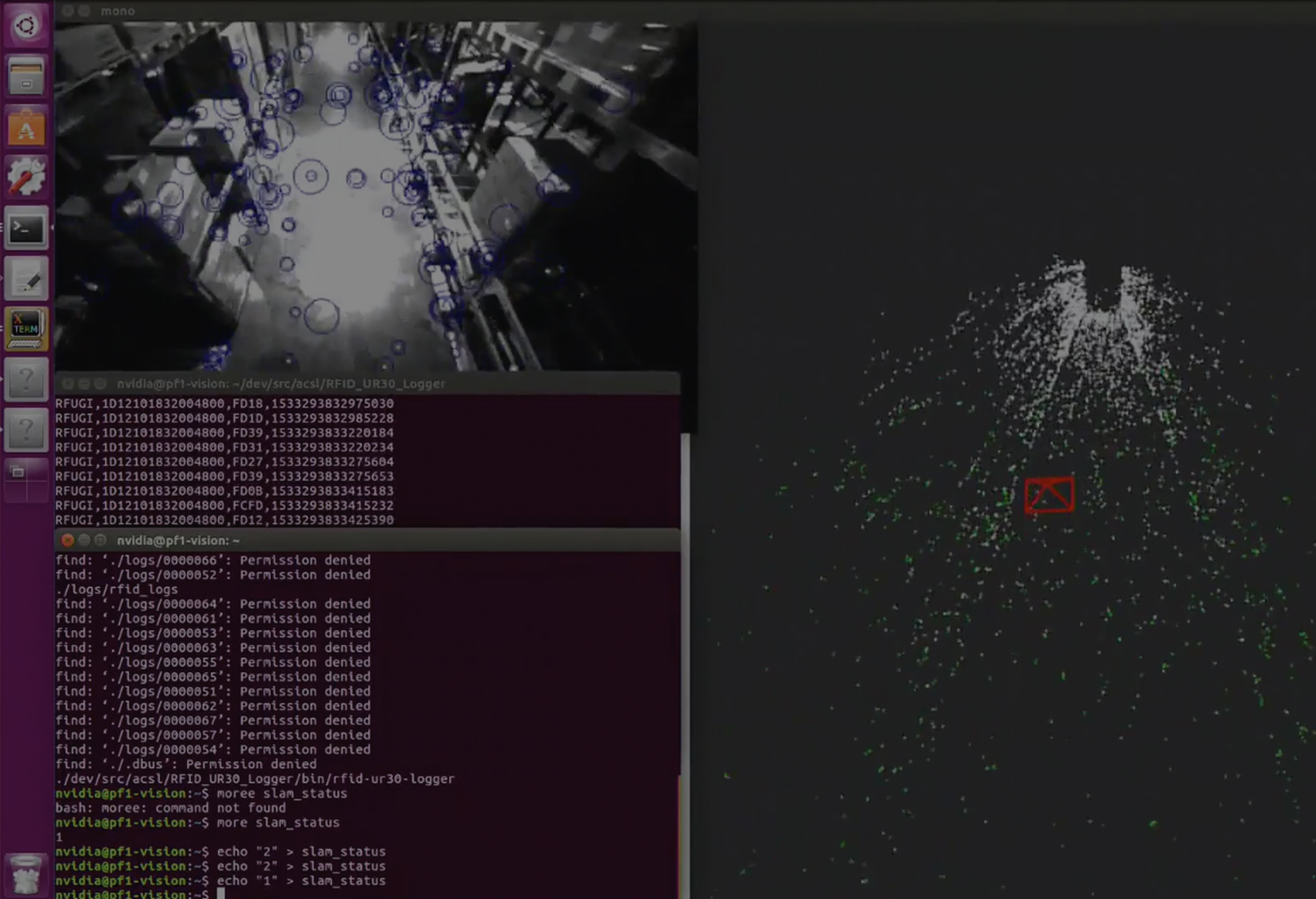
Visual SLAM for GPS-denied environmentVisual SLAM enabling indoor autonomous flightVisual SLAM computes drone position relative to the surrounding environment by extracting feature points and saving them as point cloud. This enables drone to conduct repetitive missions indoor, such as regular inspection of facility, warehouse stock counting, and tunnel inspection.
-
CASE 01
Nishimatsu Construction, Auto-crack detection for concrete floorAutomating concrete floor crack detection using dronesNishimatsu Construction and ACSL developed a system to automatically detect cracks in concrete floors. This system consists of autonomous drone that operate in indoor environment, and concrete crack detection algorithm. Compared to conventional method, it is expected to improve the quality of crack detection, and to reduce the cost for conducting the inspection.
-
CASE 02
Visual SLAM for GPS-denied environmentVisual SLAM enabling indoor autonomous flightVisual SLAM computes drone position relative to the surrounding environment by extracting feature points and saving them as point cloud. This enables drone to conduct repetitive missions indoor, such as regular inspection of facility, warehouse stock counting, and tunnel inspection.
-
CASE 01
Nishimatsu Construction, Auto-crack detection for concrete floorAutomating concrete floor crack detection using dronesNishimatsu Construction and ACSL developed a system to automatically detect cracks in concrete floors. This system consists of autonomous drone that operate in indoor environment, and concrete crack detection algorithm. Compared to conventional method, it is expected to improve the quality of crack detection, and to reduce the cost for conducting the inspection.
-
CASE 02
Visual SLAM for GPS-denied environmentVisual SLAM enabling indoor autonomous flightVisual SLAM computes drone position relative to the surrounding environment by extracting feature points and saving them as point cloud. This enables drone to conduct repetitive missions indoor, such as regular inspection of facility, warehouse stock counting, and tunnel inspection.